G P M 模型
定义于src/runtime/runtime2.go:
- G: Gourtines, 每个Goroutine对应一个G结构体,G保存Goroutine的运行堆栈,即并发任务状态。G并非执行体,每个G需要绑定到P才能被调度执行。
- P: Processors, 对G来说,P相当于CPU核,G只有绑定到P(在P的local runq中)才能被调度。对M来说,P提供了相关的执行环境(Context),如内存分配状态(mcache),任务队列(G)等
- M: Machine, OS线程抽象,负责调度任务,和某个P绑定,从P的runq中不断取出G,切换堆栈并执行,M本身不具备执行状态,在需要任务切换时,M将堆栈状态写回G,任何其它M都能据此恢复执行。
Go1.1之前只有G-M模型,没有P,Dmitry Vyukov在Scalable Go Scheduler Design Doc提出该模型在并发伸缩性方面的问题,并通过加入P(Processors)来改进该问题。
G-P-M模型示意图:
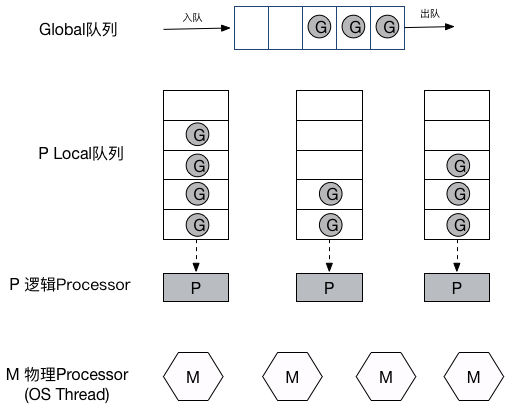
补充说明:
- P的个数由GOMAXPROCS指定,是固定的,因此限制最大并发数
- M的个数是不定的,由Go Runtime调整,默认最大限制为10000个
调度流程
在M与P绑定后,M会不断从P的Local队列(runq)中取出G(无锁操作),切换到G的堆栈并执行,当P的Local队列中没有G时,再从Global队列中返回一个G(有锁操作,因此实际还会从Global队列批量转移一批G到P Local队列),当Global队列中也没有待运行的G时,则尝试从其它的P窃取(steal)部分G来执行,源代码如下:
// go1.9.1 src/runtime/proc.go
// 省略了GC检查等其它细节,只保留了主要流程
// g: G结构体定义
// sched: Global队列
// 获取一个待执行的G
func findrunnable() (gp *g, inheritTime bool) {
// 获取当前的G对象
_g_ := getg()
top:
// 获取当前P对象
_p_ := _g_.m.p.ptr()
// 1. 尝试从P的Local队列中取得G 优先_p_.runnext 然后再从Local队列中取
if gp, inheritTime := runqget(_p_); gp != nil {
return gp, inheritTime
}
// 2. 尝试从Global队列中取得G
if sched.runqsize != 0 {
lock(&sched.lock)
// globrunqget从Global队列中获取G 并转移一批G到_p_的Local队列
gp := globrunqget(_p_, 0)
unlock(&sched.lock)
if gp != nil {
return gp, false
}
}
// 3. 检查netpoll任务
if netpollinited() && sched.lastpoll != 0 {
if gp := netpoll(false); gp != nil { // non-blocking
// netpoll返回的是G链表,将其它G放回Global队列
injectglist(gp.schedlink.ptr())
casgstatus(gp, _Gwaiting, _Grunnable)
if trace.enabled {
traceGoUnpark(gp, 0)
}
return gp, false
}
}
// 4. 尝试从其它P窃取任务
procs := uint32(gomaxprocs)
if atomic.Load(&sched.npidle) == procs-1 {
goto stop
}
if !_g_.m.spinning {
_g_.m.spinning = true
atomic.Xadd(&sched.nmspinning, 1)
}
for i := 0; i < 4; i++ {
// 随机P的遍历顺序
for enum := stealOrder.start(fastrand()); !enum.done(); enum.next() {
if sched.gcwaiting != 0 {
goto top
}
stealRunNextG := i > 2 // first look for ready queues with more than 1 g
// runqsteal执行实际的steal工作,从目标P的Local队列转移一般的G过来
// stealRunNextG指是否steal目标P的p.runnext G
if gp := runqsteal(_p_, allp[enum.position()], stealRunNextG); gp != nil {
return gp, false
}
}
}
...
}
当没有G可被执行时,M会与P解绑,然后进入休眠(idle)状态。
用户态阻塞/唤醒
当Goroutine因为Channel操作而阻塞(通过gopark)时,对应的G会被放置到某个wait队列(如channel的waitq),该G的状态由_Gruning变为_Gwaitting,而M会跳过该G尝试获取并执行下一个G。
当阻塞的G被G2唤醒(通过goready)时(比如channel可读/写),G会尝试加入G2所在P的runnext,然后再是P Local队列和Global队列。
syscall
当G被阻塞在某个系统调用上时,此时G会阻塞在_Gsyscall状态,M也处于block on syscall状态,此时仍然可被抢占调度: 执行该G的M会与P解绑,而P则尝试与其它idle的M绑定,继续执行其它G。如果没有其它idle的M,但队列中仍然有G需要执行,则创建一个新的M。
当系统调用完成后,G会重新尝试获取一个idle的P,并恢复执行,如果没有idle的P,G将加入到Global队列。
系统调用能被调度的关键有两点:
runtime/syscall包中,将系统调用分为SysCall和RawSysCall,前者和后者的区别是前者会在系统调用前后分别调用entersyscall和exitsyscall(位于src/runtime/proc.go),做一些现场保存和恢复操作,这样才能使P安全地与M解绑,并在其它M上继续执行其它G。某些系统调用本身可以确定会长时间阻塞(比如锁),会调用entersyscallblock在发起系统调用前直接让P和M解绑(handoffp)。
另一个关键点是sysmon,它负责检查所有系统调用的执行时间,判断是否需要handoffp。
sysmon
sysmon是一个由runtime启动的M,也叫监控线程,它无需P也可以运行,它每20us~10ms唤醒一次,主要执行:
- 释放闲置超过5分钟的span物理内存;
- 如果超过2分钟没有垃圾回收,强制执行;
- 将长时间未处理的netpoll结果添加到任务队列;
- 向长时间运行的G任务发出抢占调度;
- 收回因syscall长时间阻塞的P;
入口在src/runtime/proc.go:sysmon函数,它通过retake实现对syscall和长时间运行的G进行调度:
func retake(now int64) uint32 {
n := 0
for i := int32(0); i < gomaxprocs; i++ {
_p_ := allp[i]
if _p_ == nil {
continue
}
pd := &_p_.sysmontick
s := _p_.status
if s == _Psyscall {
// Retake P from syscall if it's there for more than 1 sysmon tick (at least 20us).
t := int64(_p_.syscalltick)
if int64(pd.syscalltick) != t {
pd.syscalltick = uint32(t)
pd.syscallwhen = now
continue
}
// 如果当前P Local队列没有其它G,当前有其它P处于Idle状态,并且syscall执行事件不超过10ms,则不用解绑当前P(handoffp)
if runqempty(_p_) && atomic.Load(&sched.nmspinning)+atomic.Load(&sched.npidle) > 0 && pd.syscallwhen+10*1000*1000 > now {
continue
}
// handoffp
incidlelocked(-1)
if atomic.Cas(&_p_.status, s, _Pidle) {
if trace.enabled {
traceGoSysBlock(_p_)
traceProcStop(_p_)
}
n++
_p_.syscalltick++
handoffp(_p_)
}
incidlelocked(1)
} else if s == _Prunning {
// Preempt G if it's running for too long.
t := int64(_p_.schedtick)
if int64(pd.schedtick) != t {
pd.schedtick = uint32(t)
pd.schedwhen = now
continue
}
// 如果当前G执行时间超过10ms,则抢占(preemptone)
if pd.schedwhen+forcePreemptNS > now {
continue
}
// 执行抢占
preemptone(_p_)
}
}
return uint32(n)
}
抢占式调度
当某个goroutine执行超过10ms,sysmon会向其发起抢占调度请求,由于Go调度不像OS调度那样有时间片的概念,因此实际抢占机制要弱很多: Go中的抢占实际上是为G设置抢占标记(g.stackguard0),当G调用某函数时(更确切说,在通过newstack分配函数栈时),被编译器安插的指令会检查这个标记,并且将当前G以runtime.Goched的方式暂停,并加入到全局队列。源代码如下:
// src/runtime/stack.go
// Called from runtime·morestack when more stack is needed.
// Allocate larger stack and relocate to new stack.
// Stack growth is multiplicative, for constant amortized cost.
func newstack(ctxt unsafe.Pointer) {
...
// gp为当前G
preempt := atomic.Loaduintptr(&gp.stackguard0) == stackPreempt
if preempt {
...
// Act like goroutine called runtime.Gosched.
// G状态由_Gwaiting变为 _Grunning 这是为了能以Gosched的方式暂停Go
casgstatus(gp, _Gwaiting, _Grunning)
gopreempt_m(gp) // never return
}
}
// 以goched的方式将G重新放入
func goschedImpl(gp *g) {
status := readgstatus(gp)
// 由Running变为Runnable
casgstatus(gp, _Grunning, _Grunnable)
// 与M解除绑定
dropg()
lock(&sched.lock)
// 将G放入Global队列
globrunqput(gp)
unlock(&sched.lock)
// 重新调度
schedule()
}
func gopreempt_m(gp *g) {
if trace.enabled {
traceGoPreempt()
}
goschedImpl(gp)
}
netpoll
前面的findrunnable,G的获取除了p.runnext,p.runq和sched.runq外,还有一中G从netpoll中获取,netpoll是Go针对网络IO的一种优化,本质上为了避免网络IO陷入系统调用之中,这样使得即便G发起网络I/O操作也不会导致M被阻塞(仅阻塞G),从而不会导致大量M被创建出来。
G创建流程
G结构体会复用,对可复用的G管理类似于待运行的G管理,也有Local队列(p.gfree)和Global队列(sched.gfree)之分,获取算法差不多,优先从p.gfree中获取(无锁操作),否则从sched.gfree中获取并批量转移一部分(有锁操作),源代码参考src/runtime/proc.go:gfget函数。
从Goroutine的角度来看,通过go func()创建时,会从当前闲置的G队列取得可复用的G,如果没有则通过malg新建一个G,然后:
- 尝试将G添加到当前P的runnext中,作为下一个执行的G
- 否则放到Local队列runq中(无锁)
- 如果以上操作都失败,则添加到Global队列sched.runq中(有锁操作,因此也会顺便将当P.runq中一半的G转移到sched.runq)
G的几种暂停方式:
- gosched: 将当前的G暂停,保存堆栈状态,以
_GRunnable状态放入Global队列中,让当前M继续执行其它任务。无需对G进行唤醒操作,因为总会有M从Global队列取得并执行该G。抢占调度即使用该方式。 - gopark: 与goched的最大区别在于gopark没有将G放回执行队列,而是位于某个等待队列中(如channel的waitq,此时G状态为
_Gwaitting),因此G必须被手动唤醒(通过goready),否则会丢失任务。应用层阻塞通常使用这种方式。 - notesleep: 既不让出M,也不让G和P重新调度,直接让线程休眠直到被唤醒(notewakeup),该方式更快,通常用于gcMark,stopm这类自旋场景
- notesleepg: 阻塞G和M,放飞P,P可以和其它M绑定继续执行,比如可能阻塞的系统调用会主动调用entersyscallblock,则会触发 notesleepg
- goexit: 立即终止G任务,不管其处于调用堆栈的哪个层次,在终止前,确保所有defer正确执行。
Go调度器的查看方法
示例程序,对比cgo sleep和time.sleep系统调用情况:
// #include <unistd.h>
import "C"
func main() {
var wg sync.WaitGroup
wg.Add(1000)
for i := 0; i < 1000; i++ {
go func() {
C.sleep(1) // 测试1
// time.Sleep(time.Second) // 测试2
wg.Done()
}()
}
wg.Wait()
println("done!")
time.Sleep(time.Second * 3)
}
通过GODEBUG运行时环境变量的schedtrace=1000参数,可以每隔1000ms查看一次调度器状态:
$ GODEBUG=schedtrace=1000 ./test
// 测试1输出结果
SCHED 0ms: gomaxprocs=4 idleprocs=2 threads=1003 spinningthreads=2 idlethreads=32 runqueue=0 [0 0 0 0]
done!
SCHED 1001ms: gomaxprocs=4 idleprocs=4 threads=1003 spinningthreads=0 idlethreads=1000 runqueue=0 [0 0 0 0]
SCHED 2001ms: gomaxprocs=4 idleprocs=4 threads=1003 spinningthreads=0 idlethreads=1000 runqueue=0 [0 0 0 0]
SCHED 3010ms: gomaxprocs=4 idleprocs=4 threads=1003 spinningthreads=0 idlethreads=1000 runqueue=0 [0 0 0 0]
// 测试2输出结果
SCHED 0ms: gomaxprocs=4 idleprocs=2 threads=6 spinningthreads=1 idlethreads=2 runqueue=129 [0 128 0 0]
done!
SCHED 1009ms: gomaxprocs=4 idleprocs=4 threads=6 spinningthreads=0 idlethreads=3 runqueue=0 [0 0 0 0]
SCHED 2010ms: gomaxprocs=4 idleprocs=4 threads=6 spinningthreads=0 idlethreads=3 runqueue=0 [0 0 0 0]
SCHED 3019ms: gomaxprocs=4 idleprocs=4 threads=6 spinningthreads=0 idlethreads=3 runqueue=0 [0 0 0 0]
其中schedtrace日志每一行的字段意义:
SCHED:调试信息输出标志字符串,代表本行是goroutine scheduler的输出;
1001ms:即从程序启动到输出这行日志的时间;
gomaxprocs: P的数量;
idleprocs: 处于idle状态的P的数量;通过gomaxprocs和idleprocs的差值,我们就可知道执行go代码的P的数量;
threads: os threads的数量,包含scheduler使用的m数量,加上runtime自用的类似sysmon这样的thread的数量;
spinningthreads: 处于自旋状态的os thread数量;
idlethread: 处于idle状态的os thread的数量;
runqueue: go scheduler全局队列中G的数量;
[0 0 0 0]: 分别为4个P的local queue中的G的数量。
可以看出,time.Sleep并没有使用系统调用,而是进行了类似netpoll类似的优化,使得仅仅是G阻塞,M不会阻塞,而在使用cgo sleep的情况下,可以看到大量的闲置M。
通过运行时环境变量GODEBUG的schedtrace参数可定时查看调度器状态:
// 每1000ms打印一次
$GODEBUG=schedtrace=1000 godoc -http=:6060
SCHED 0ms: gomaxprocs=4 idleprocs=3 threads=3 spinningthreads=0 idlethreads=0 runqueue=0 [0 0 0 0]
SCHED 1001ms: gomaxprocs=4 idleprocs=0 threads=9 spinningthreads=0 idlethreads=3 runqueue=2 [8 14 5 2]
SCHED 2006ms: gomaxprocs=4 idleprocs=0 threads=25 spinningthreads=0 idlethreads=19 runqueue=12 [0 0 4 0]
SCHED 3006ms: gomaxprocs=4 idleprocs=0 threads=26 spinningthreads=0 idlethreads=8 runqueue=2 [0 1 1 0]
...
GODEBUG还可使用GODEBUG="schedtrace=1000,scheddetail=1"选项来查看每个G,P,M的调度状态,打出的信息非常详尽复杂,平时应该是用不到。关于Go调试可参考Dmitry Vyukov大牛的Debugging performance issues in Go programs。
总结
再回头来看,Go 为什么要使用GPM?而不是像大多数调度器一样只有两层关系GM,直接用M(OS线程)的数量来限制并发能力。我粗浅的理解是为了更好地处理syscall,当某个M陷入系统调用时,P则”抛妻弃子”,与M解绑,让阻塞的M和G等待被OS唤醒,而P则带着local queue剩下的G去找一个(或新建一个)idle的M,当阻塞的M被唤醒时,它会尝试给G找一个新的归宿(idle的P,或扔到global queue,等待被领养)。多么忧桑的故事。
相关资料: